Examples¶
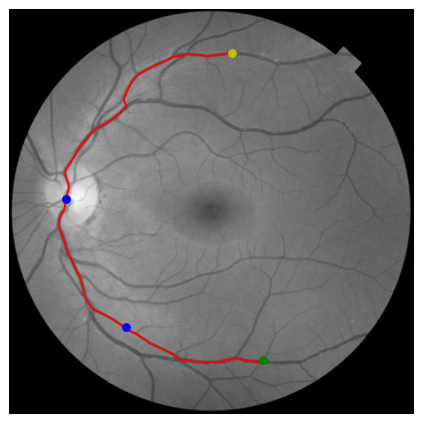
Retina Vessels¶
Extracting the minimal path through the retina vessels with additional way points.
from skimage.data import retina
from skimage.color import rgb2gray
from skimage.transform import rescale
from skimage.filters import sato
from skmpe import mpe
image = rescale(rgb2gray(retina()), 0.5)
speed_image = sato(image)
start_point = (76, 388)
end_point = (611, 442)
way_points = [(330, 98), (554, 203)]
path_info = mpe(speed_image, start_point, end_point, way_points)
px, py = path_info.path[:, 1], path_info.path[:, 0]
plt.imshow(image, cmap='gray')
plt.plot(px, py, '-r')
plt.plot(*start_point[::-1], 'oy')
plt.plot(*end_point[::-1], 'og')
for p in way_points:
plt.plot(*p[::-1], 'ob')
plt.axis('off')
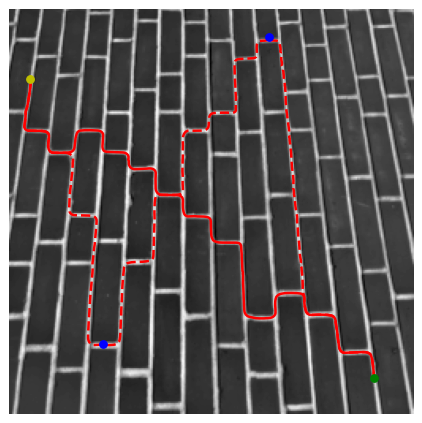
Bricks¶
Extracting the shortest paths through “bricks” image.
from skimage.data import brick
from skimage.transform import rescale
from skimage.exposure import rescale_intensity, adjust_sigmoid
from skmpe import parameters, mpe
image = rescale(brick(), 0.5)
speed_image = rescale_intensity(
adjust_sigmoid(image, cutoff=0.5, gain=10).astype(np.float_), out_range=(0., 1.))
start_point = (44, 13)
end_point = (233, 230)
way_points = [(211, 59), (17, 164)]
with parameters(integrate_max_step=1.0):
path_info1 = mpe(speed_image, start_point, end_point)
path_info2 = mpe(speed_image, start_point, end_point, way_points)
px1, py1 = path_info1.path[:, 1], path_info1.path[:, 0]
px2, py2 = path_info2.path[:, 1], path_info2.path[:, 0]
plt.imshow(image, cmap='gray')
plt.plot(px1, py1, '-r', linewidth=2)
plt.plot(px2, py2, '--r', linewidth=2)
plt.plot(*start_point[::-1], 'oy')
plt.plot(*end_point[::-1], 'og')
for p in way_points:
plt.plot(*p[::-1], 'ob')
plt.axis('off')
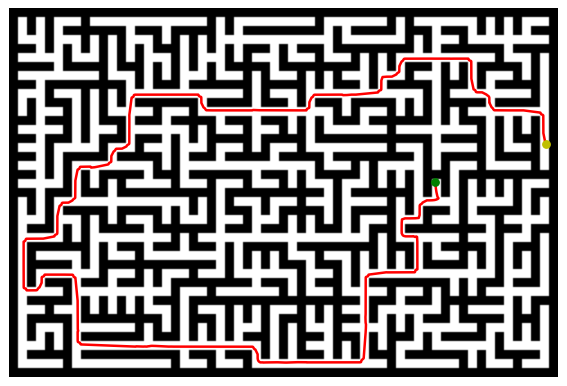
Maze¶
Finding the path in the maze.
from skimage.io import imread
from skimage.exposure import rescale_intensity
from skmpe import parameters, mpe, OdeSolverMethod
image = imread('_static/maze.png', as_gray=True).astype(np.float_)
speed_image = rescale_intensity(image, out_range=(0.005, 1.0))
start_point = (60, 238)
end_point = (77, 189)
with parameters(ode_solver_method=OdeSolverMethod.LSODA, integrate_max_step=1.0):
path_info = mpe(speed_image, start_point, end_point)
path = path_info.path
plt.imshow(image, cmap='gray')
plt.plot(path[:, 1], path[:, 0], '-r', linewidth=2)
plt.plot(*start_point[::-1], 'oy')
plt.plot(*end_point[::-1], 'og')
plt.axis('off')